受费曼工作(The Feynman Lectures on Physics)启发,近日,江苏大学徐琳教授、丁建宁教授与美国科罗拉多大学博尔德分校弗兰克·韦尔内瑞教授合作报告了一种基于液晶弹性体辐条的非对称收缩来旋转运动的费曼软体机器人,创新性地实现了无需控制电源周期性开关即可进行持续自主运动的电驱动液晶弹性体软体机器人。该研究以“Programming motion into materials using electricity-driven liquid crystal elastomer actuators”为题发表在国际著名期刊《软体机器人》(Soft Robotics)上。江苏大学机械工程学院为该论文的第一单位,研究生朱陈和塞缪尔·拉蒙特为共同一作。
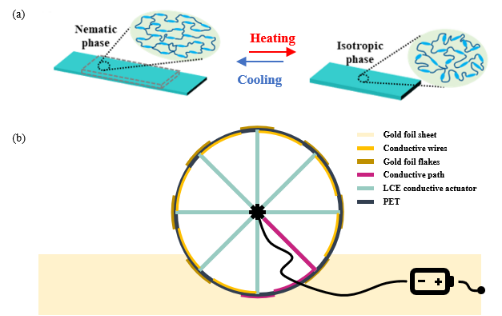
图1. 液晶弹性体驱动机理与Feynman软体机器人结构
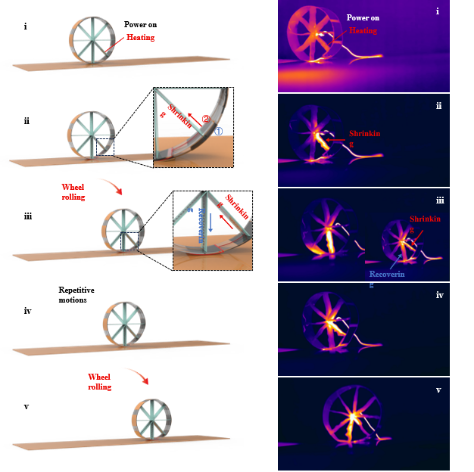
图2. Feynman车轮软体机器人持续运动机制

Feynman车轮软体机器人运动展示
智能材料变形驱动是集材料、力学、生物学等多学科的交叉前沿研究热点。液晶弹性体(Liquid crystal elastomers,LCEs) 作为能够产生大的可逆驱动应变的智能柔性弹性体材料,通过设计含有各向异性刚性介晶单元的聚合物网络结构,在外界刺激下(光、热、电等) 使其达到相转变温度时,引发由液晶态(有序)向各向同性态(无序)转变的链段运动,进而表现为宏观结构程序化变形。液晶弹性体材料类似于自然界生物体在多种外界刺激下自我调节的特性,在开发智能仿生设备和构建软体机器人系统中拥有巨大的应用前景。基于液晶弹性体辐条的非对称收缩,可直接从稳定的外部电源获取能量以维持软体机器人的连续旋转运动,这一设计理念有望启发其他软体机器人智能材料与智能结构的多元集成,代表着自主运动的软体机器人设计向前迈进了可喜的一步。
研究还阐述了基于LCE-LM电驱动器的一些其他有趣的应用。如图3所示,研究人员构建了手掌可动(5 mm~ 55 mm)的双向驱控的柔性夹持器,在 2 A 至 4 A 的低电流刺激下,可以精确外夹或内撑抓取如文件夹、螺钉、烧杯和环形工件等异形物品,解决了传统外夹式单向驱动的液晶弹性体柔性夹持器受其驱动结构的制约,难以精确抓取异形环形等工件,应用潜力受到限制的问题。值得注意的是,夹持器可保留97%水重量下夹持吸水海绵,在柔性异形敏感物品的抓取中展现出优势。

图3. 用于柔性异形操纵的双向驱控夹持器

用于柔性操纵的液晶弹性体夹持器
受控驱动的定向运动是开发能够自主运动的软体机器人的基础。受果蝇幼虫运动的启发,研究提出了可通过连续的通电和断电循环诱导其定向爬行的液晶弹性体软体机器人,软体机器人定向移动的原理基于足部不对称设计造成的各向异性摩擦,机器人柔性基底材料的表面粗糙度、硬度和几何形状对摩擦特性的影响机制在团队2022年发表的工作中已有阐述。
研究还发现,软体机器人的水平运动可以显示为与前足与后足之间的法向力差成正比,可以通过优先考虑该法向力的巨大不平衡以优化机器人的几何设计。在此基础上优化的软体机器人自重仅1.9 g,通过独立驱动左右“液晶弹性体肌肉”,转向机器人在低电流的驱动下可在平坦和倾斜的表面上实现转弯半径(70~150 mm)的精准控制(图4)。
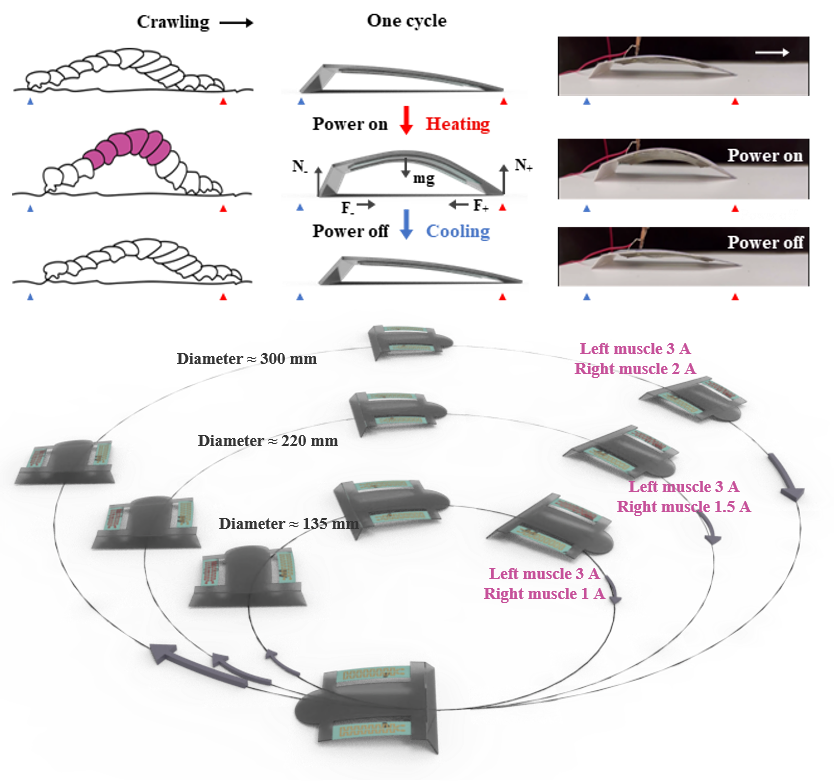
图4. 仿生爬行软体机器人
该工作得到了国家自然科学基金、江苏省自然科学基金和机械系统与振动全国重点实验室开放基金等项目的支持。(机械工程学院)
文章链接:https://doi.org/10.1089/soro.2023.0063

